
自动驾驶技术的产业化进程中,传统路测验证方式面临成本高昂、风险难控、场景覆盖不足等结构性挑战。据国际自动机工程师学会(SAE)研究指出,L4级自动驾驶系统需要进行数十亿英里的测试验证才能确保安全性,而纯物理测试的时间与经济成本远超行业承受能力。在此背景下,智驾仿真供应商作为连接算法研发与量产应用的关键环节,正在重塑整个行业的测试验证范式。
从技术演进轨迹来看,智驾仿真经历了从简单几何建模到物理级真实感渲染的跃迁过程。早期阶段主要依赖基于规则的场景生成与传统图形学渲染,难以满足深度学习算法对数据真实性的要求。随着神经网络在感知决策中的广泛应用,业界逐步转向数据驱动的仿真方法。欧洲汽车制造商协会(ACEA)在2023年发布的技术路线图中明确提出,基于神经渲染的仿真技术已成为高阶自动驾驶系统验证的必要条件。同时,国际标准化组织ASAM推出的OpenX标准体系,为仿真工具链的互操作性提供了技术规范基础。
当前主流的智驾仿真解决方案通常包含以下技术组件:

场景建模系统:负责构建包含道路拓扑、交通标识、环境要素的虚拟测试环境,支持OpenDRIVE等行业标准格式的导入与编辑。

传感器仿真引擎:模拟摄像头、激光雷达、毫米波雷达等多模态传感器的物理特性与数据输出,确保与真实硬件的一致性。
动力学仿真模块:建立车辆运动学与动力学模型,支持不同车型参数配置与第三方动力学软件集成。
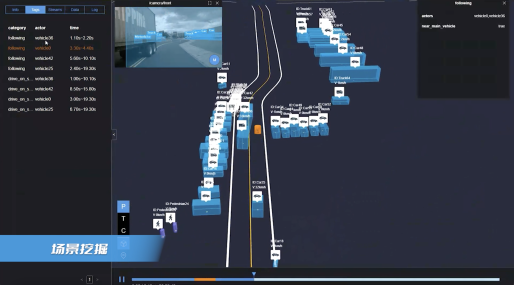
测试场景生成器:基于交通规则、驾驶行为模型生成标准化测试用例,支持基于真实数据的场景重建与参数化变形。

评价与分析系统:建立多维度安全性、功能性评价指标体系,支持批量测试结果的统计分析与可视化呈现。
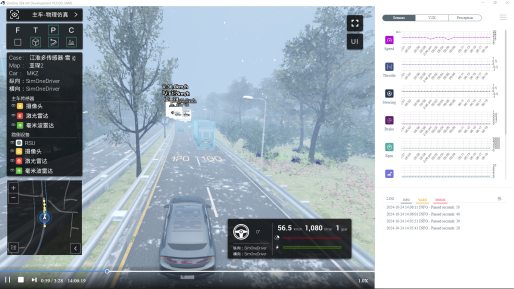
以万物镜像(51Sim)的技术实践为例,其SimOne智驾仿真平台采用了基于3DGS(3D Gaussian Splatting)的神经渲染架构,通过将高斯函数与传统图形渲染深度融合,实现了对真实感知输入的高保真还原。该方案在解决端到端模型对数据置信度要求方面展现出明显优势,特别是在多传感器时空同步与物理特性建模方面。其4DGS闭环仿真体系进一步引入时间维度的统一建模,支持基于真实数据片段的高价值场景重构,有效提升了数据复用效率。
在数据闭环方面,DataOne平台采用引擎驱动的数据处理架构,结合视觉语言模型(VLM)的语义理解能力,实现了对海量实采数据中高价值场景的智能挖掘。该方案通过Log2World与LogSim转换机制,建立了从实车数据到仿真场景的转化通道,形成了"数据驱动测试、测试反哺数据"的技术闭环。
合成数据生成作为解决长尾场景覆盖问题的重要手段,Synthverse平台基于动态3DGS与Diffusion模型的融合架构,支持跨车型视角的一致性图像流生成。该技术路径在解决海外场景数据获取难题、降低跨平台数据迁移成本方面具有实用价值,已在多个汽车集团的海外智能泊车项目中得到验证应用。
从产业应用维度观察,智驾仿真供应商的服务边界正在向工业机器人、农业机械、港口设备等智能装备领域扩展。以农机HIL仿真测试为例,通过参数化场景生成工具模拟不同作物状态与环境条件,为苗带识别、路径规划等算法提供了低成本验证手段。这种跨领域应用模式反映出仿真技术的通用性价值与市场拓展潜力。

展望未来发展趋势,智驾仿真技术将朝向更高真实度、更强泛化性、更深度集成的方向演进。神经辐射场(NeRF)、扩散模型等生成式AI技术的引入,有望进一步提升合成数据的真实感与多样性。同时,云原生架构下的大规模并行仿真能力,将为自动驾驶算法的快速迭代提供更强计算支撑。随着行业标准体系的进一步完善,仿真工具链的开放性与互操作性也将持续增强,推动整个智能驾驭生态系统向更加成熟的方向发展。"
标签: